CONCEPTO DE MÁQUINA
Una máquina es un conjunto de elementos móviles y fijos cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energía, o realizar un trabajo con un fin determinado.

CONCEPTO DE AUTÓMATA
La palabra autómata es un término que se emplea en nuestro idioma para referir varias cuestiones, buena parte de ellas asociadas a la noción de automático, que como sabemos implica a aquello que funciona, en casi todo o en todo, por sus propios medios, y generalmente, como consecuencia que se le ha provisto de un mecanismo especial que le permite realizar tareas y acciones de manera autosuficiente.

HISTORIA DE LA ROBÓTICA
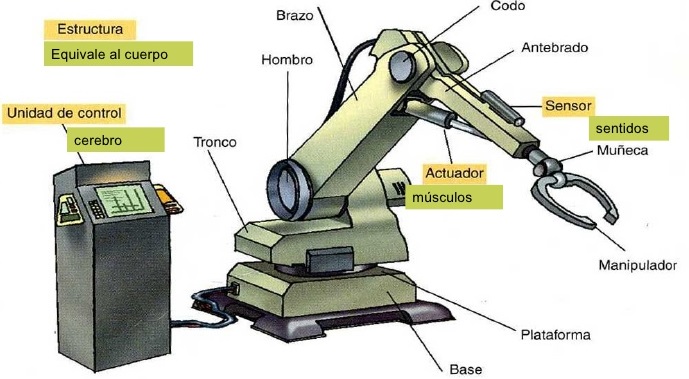
Por siglos el ser humano ha construido máquinas que imiten las partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses. Estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses. Los griegos construyeron estatuas que operaban con sistemas hidráulicas, los cuales se utilizaban para fascinar a los adoradores de los templos.
Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos muy ingeniosos que tenían algunas características de robots.
Jacques de Vauncansos construyó varios músicos de tamaño humano a mediados del siglo XVIII. Esencialmente se trataba de robots mecánicos diseñados para un propósito específico: la diversión.
En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos. Una serie de levas se utilizaban como ‘ el programa ’ para el dispositivo en el proceso de escribir y dibujar. Éstas creaciones mecánicas de forma humana deben considerarse como inversiones aisladas que reflejan el genio de hombres que se anticiparon a su época. Hubo otras invenciones mecánicas durante la revolución industrial, creadas por mentes de igual genio, muchas de las cuales estaban dirigidas al sector de la producción textil. Entre ellas se puede citar la hiladora giratoria de Hargreaves (1770), la hiladora mecánica de Crompton (1779), el telar mecánico de Cartwright (1785), el telar de Jacquard (1801), y otros.
El desarrollo en la tecnología, donde se incluyen las poderosas computadoras electrónicas, los actuadores de control retroalimentados, transmisión de potencia a través de engranes, y la tecnología en sensores han contribuido a flexibilizar los mecanismos autómatas para desempeñar tareas dentro de la industria. Son varios los factores que intervienen para que se desarrollaran los primeros robots en la década de los 50’s. La investigación en inteligencia artificial desarrolló maneras de emular el procesamiento de información humana con computadoras electrónicas e inventó una variedad de mecanismos para probar sus teorías.
No obstante las limitaciones de las máquinas robóticas actuales, el concepto popular de un robot es que tiene una apariencia humana y que actúa como tal. Este concepto humanoide ha sido inspirado y estimulado por varias narraciones de ciencia ficción.
Una obra checoslovaca publicada en 1917 por Karel Kapek, denominada Rossum’s Universal Robots, dio lugar al término robot. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, y cuando se tradujo al ingles se convirtió en el término robot.
A continuación se presenta un cronograma de los avances de la robótica desde sus inicios.
FECHA
|
DESARROLLO
|
SigloXVIII.
|
A mediados del J. de Vaucanson construyó varias muñecas mecánicas de tamaño humano que ejecutaban piezas de música
|
1801
|
J. Jaquard invento su telar, que era una máquina programable para la urdimbre
|
1805
|
H. Maillardet construyó una muñeca mecánica capaz de hacer dibujos.
|
1946
|
El inventor americano G.C Devol desarrolló un dispositivo controlador que
|
podía registrar señales eléctricas por medios magnéticos y reproducirlas para
| |
accionar un máquina mecánica. La patente estadounidense se emitió en 1952.
| |
1951
|
Trabajo de desarrollo con teleoperadores (manipuladores de control remoto)
|
para manejar materiales radiactivos. Patente de Estados Unidos emitidas para Goertz (1954) y Bergsland (1958).
| |
1952
|
Una máquina prototipo de control numérico fue objetivo de demostración en el Instituto Tecnológico de Massachusetts después de varios años de desarrollo.
|
Un lenguaje de programación de piezas denominado APT (Automatically
| |
Programmed Tooling) se desarrolló posteriormente y se publicó en 1961.
| |
1954
|
El inventor británico C. W. Kenward solicitó su patente para diseño de robot.
|
Patente británica emitida en 1957.
| |
1954
|
G.C. Devol desarrolla diseños para Transferencia de artículos programada.
|
Patente emitida en Estados Unidos para el diseño en 1961.
| |
1959
|
Se introdujo el primer robot comercial por Planet Corporation. estaba controlado por interruptores de fin de carrera.
|
1960
|
Se introdujo el primer robot ‘Unimate’’, basada en la transferencia de artic.
|
programada de Devol. Utilizan los principios de control numérico para el
| |
control de manipulador y era un robot de transmisión hidráulica.
| |
1961
|
Un robot Unimate se instaló en la Ford Motors Company para atender una
|
máquina de fundición de troquel.
| |
1966
|
Trallfa, una firma noruega, construyó e instaló un robot de pintura por pulverización.
|
FECHA
|
DESARROLLO
|
1968
|
Un robot móvil llamado ‘Shakey’’ se desarrollo en SRI (standford Research
|
Institute), estaba provisto de una diversidad de sensores así como una cámara de visión y sensores táctiles y podía desplazarse por el suelo.
| |
1971
|
El ‘Standford Arm’’, un pequeño brazo de robot de accionamiento eléctrico, se desarrolló en la Standford University.
|
1973
|
Se desarrolló en SRI el primer lenguaje de programación de robots del tipo de computadora para la investigación con la denominación WAVE. Fue
|
seguido por el lenguaje AL en 1974. Los dos lenguajes se desarrollaron
| |
posteriormente en el lenguaje VAL comercial para Unimation por Víctor Scheinman y Bruce Simano.
| |
1974
|
ASEA introdujo el robot Irb6 de accionamiento completamente eléctrico.
|
1974
|
Kawasaki, bajo licencia de Unimation, instaló un robot para soldadura por arco para estructuras de motocicletas.
|
1974
|
Cincinnati Milacron introdujo el robot T3 con control por computadora.
|
1975
|
El robot ‘Sigma’’ de Olivetti se utilizó en operaciones de montaje, una de las
|
primitivas aplicaciones de la robótica al montaje.
| |
1976
|
Un dispositivo de Remopte Center Compliance (RCC) para la inserción de
|
piezas en la línea de montaje se desarrolló en los laboratorios Charles Stark
| |
Draper Labs en estados Unidos.
| |
1978
|
El robot T3 de Cincinnati Milacron se adaptó y programó para realizar operaciones de taladro y circulación de materiales en componentes de aviones, bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing).
|
1978
|
Se introdujo el robot PUMA (Programmable Universal Machine for Assambly) para tareas de montaje por Unimation, basándose en diseños obtenidos en un estudio de la General Motors.
|
1979
|
Desarrollo del robot tipo SCARA (Selective Compliance Arm for Robotic
|
Assambly) en la Universidad de Yamanashi en Japón para montaje. Varios robots SCARA comerciales se introdujeron hacia 1981.
| |
1980
|
Un sistema robótico de captación de recipientes fue objeto de demostración en la Universidad de Rhode Island. Con el empleo de visión de máquina
|
el sistema era capaz de captar piezas en orientaciones aleatorias y posiciones
| |
fuera de un recipiente.
|
FECHA
|
DESARROLLO
|
1981
|
Se desarrolló en la Universidad de Carnegie- Mellon un robot de impulsión
|
directa. Utilizaba motores eléctricos situados en las articulaciones del manipula dor sin las transmisiones mecánicas habituales empleadas en la mayoría de los robots.
| |
1982
|
IBM introdujo el robot RS-1 para montaje, basado en varios años de desarro
|
llo interno. Se trata de un robot de estructura de caja que utiliza un brazo
| |
constituido por tres dispositivos de deslizamiento ortogonales. El lenguaje del robot AML, desarrollado por IBM, se introdujo también para programar
| |
el robot SR-1.
| |
1983
|
Informe emitido por la investigación en Westinghouse Corp. bajo el patrocinio de National Science Foundation sobre un sistema de montaje
|
programable adaptable (APAS), un proyecto piloto para una línea de montaje automatizada flexible con el empleo de robots.
| |
1984
|
Robots 8. La operación típica de estos sistemas permitía que se desarrollaran
|
programas de robots utilizando gráficos interactivos en una computadora
| |
personal y luego se cargaban en el robot.
CARACTERÍSTICAS DE UN ROBOT
Existen diversos tipos de clasificaciones de robots y cada clasificación tiene diversas características, algunas de las características que comparten los robots son:

SISTEMA DE CONTROL
Dentro de la ingeniería de sistemas, un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados deseados. Por lo general, se usan sistemas de control industriales en procesos de producción industriales1 para controlar equipos o máquinas.2
Existen dos clases comunes de sistemas de control, sistemas de lazo abierto y sistemas de lazo cerrado. En los sistemas de control de lazo abierto la salida se genera dependiendo de la entrada; mientras que en los sistemas de lazo cerrado la salida depende de las consideraciones y correcciones realizadas por la retroalimentación. Un sistema de lazo cerrado es llamado también sistema de control con realimentación. Los sistemas de control más modernos en ingeniería automatizan procesos sobre la base de muchos parámetros y reciben el nombre de controladores de automatización programables (PAC).
|

TIPOS DE SISTEMAS DE CONTROL
Los sistemas de control se clasifican en dos tipos:
Sistemas de control en lazo abierto y Sistemas de control en lazo cerrado o realimentado.
El motor a vapor del tema anterior es un buen ejemplo de un sistema de control en lazo cerrado. Cuando se mueve la válvula se controla la cantidad de vapor que va al pistón y por ende se controla la velocidad del motor. La válvula y el accionar de la válvula se convierte en el controlador y el motor se convierte en el sistema. La variable manipulada es la cantidad de vapor y la variable controlada es la velocidad de rotación del motor de vapor.
 |
Cuando se utiliza el regulador centrífugo se está midiendo la velocidad de rotación, y con ésta se ajusta la apertura de la válvula. Así observamos que la salida del sistema es realimentada a la entrada del control. En la siguiente figura podemos observar el diagrama de este tipo de sistema,
 |
SENSORES
Un sensor es todo aquello que tiene una propiedad sensible a una magnitud del medio, y al variar esta magnitud también varia con cierta intensidad la propiedad, es decir, manifiesta la presencia de dicha magnitud, y también su medida.
Un sensor en la industria es un objeto capaz de variar una propiedad ante magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas con un transductor en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: intensidad lumínica, temperatura, distancia, aceleración, inclinación, presión, desplazamiento, fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una tensión eléctrica (como en un termopar), una corriente eléctrica , etc.

TIPOS DE SENSORES
Existen múltiples tipos de sensores cuya función varía de acuerdo al tipo de estímulo que pueden detectar (Garage, 2017).
Ultrasónico
Son sensores utilizados para detectar la proximidad física de un objeto con el fin de evitar un roce o choque mecánico.
Operan enviando una onda de sonido, que posteriormente choca contra una superficie y se devuelve. De este modo, el sensor mide el tiempo que tarda en regresar la onda y así calcula la distancia entre objetos.
Es un tipo de sensor que trabaja únicamente en espacios donde hay presencia de aire, ya que el desplazamiento de la onda de sonido solo se puede dar en este medio.
Por otro lado, es útil para detectar objetos sin importar su estado (sólido o líquido) o su color, por tanto, son excelentes para efectuar labores de rastreo o medición de distancias (Sensores y Transductores, 2017).
Humedad
Son sensores que miden la humedad relativa y la temperatura de un ambiente. Cuentan con circuitos integrados que les permiten emitir una señal acondicionada.
Usualmente, cuentan con un punto sensible que capta las señales del ambiente. Este punto es fabricado con polímeros y electrodos de platino.
La mayoría son calibrados por láser, tiene un buen rendimiento y un margen de error mínimo.
Velocidad
Los sensores utilizados para detectar la velocidad de un objeto o vehículo se conocen como “velocímetros”.
Existen diferentes tipos de sensores para detectar la velocidad, como sensores de rueda, velocímetros para vehículos, LIDAR (por su nombre en inglés “Light Detection and Ranging”), radares de velocidad de piso, radares doppler, indicadores de velocidad, tubos pitot, entre otros.
Estos sensores suelen ser utilizados para la sincronización de motores en diferentes industrias. También son útiles para controlar la velocidad o revoluciones por minuto de una máquina dada.
Por otro lado, en las carreteras es común ver sensores de velocidad cuya labor es la de detectar la velocidad de los vehículos que transitan por dicha carretera.
Temperatura
Un sensor de temperatura es un artefacto que arroja información sobre la temperatura del medio a través de un impulso eléctrico.
Este impulso eléctrico pasa en forma de voltaje, y la proporción de este voltaje es equivalente al valor de la temperatura medida.
Existen diferentes tipos de sensores utilizados para medir la temperatura. Están los sensores de contacto, los de no-contacto, los sensores mecánicos y los eléctricos.
Un ejemplo de sensor mecánico es un termómetro convencional y un sensor eléctrico puede ser un termistor.
Los sensores de temperatura se utilizan en el ámbito industrial para controlar la temperatura de los artefactos y las máquinas involucradas en procesos de manufactura. De esta forma, la información tomada del ambiente puede ser leída y controlada.
Piroeléctrico
Un sensor piroeléctrico o sensor PIR es aquel que se usa para medir la radiación de luz infrarroja emitida por un objeto dentro de su campo.
Cada objeto que tiene una temperatura por encima de los cero grados, produce energía calórica en la forma de radiación. Esta radiación emite ondas infrarrojas que son invisibles para el ojo humano, pero pueden ser captadas por los sensores PIR.
Los sensores PIR se clasifican de acuerdo a su ángulo (la amplitud del área que pueden abarcar) en relación a la cantidad de elementos en movimiento que pueden detectar dentro de dicha área.
Son sensores comúnmente utilizados en aplicaciones cotidianas, como el sistema de apertura de las puertas automáticas y en general todos los sistemas que reaccionan frente a un movimiento.
Cuando un cuerpo se mueve, una señal infrarroja es emitida. Cuando esta señal es detectada por un sensor PIR, éste envía una señal a un microcontrolador, que se encargará de traducir dicha señal en una respuesta.
Luz
Los sensores de luz son sensores reflectivos que operan por intercepción de la señal. Operan haciendo uso de una célula receptora del estímulo enviado por una fuente luminosa, que puede ser una lámpara, un LED, un diodo láser, entre otros.
Existen muchos tipos de células foto-receptoras, cada uno de estos tipos reacciona de acuerdo a la intensidad de la señal lumínica recibida.
Generalmente, la señal lumínica puede ser convertida en energía eléctrica, al ser capturada por celdas fotovoltaicas.
Este es el caso de los paneles solares, los cuales capturan los electrones libres presentes en la luz del sol, y los transforman en una corriente eléctrica que puede ser utilizada para energizar un circuito (Olivia, 2010).
Contacto
Los sensores de contacto son aquellos que utilizan interruptores que se activan haciendo uso de actuadores físicos.
Algunos robots de uso industrial utilizan este tipo de sensores a manera de “bigotes de gato” o alambres finos que permiten detectar la proximidad de los elementos.
Los sensores de contacto son útiles para evitar golpes entre objetos. Por esta razón, son comúnmente utilizados en la industria automovilística en los paragolpes traseros de los autos.
Sonido
Este tipo de sensor tiene la capacidad de captar los sonidos del ambiente por medio de un sistema de sonar o micrófono.
Son usualmente utilizados para recibir estímulos como órdenes de forma remota o para medir distancias con base a la percepción de la onda de sonido.
Los sensores de sonido funcionan de forma similar a los sensores ultrasónicos, ya que la onda de sonido debe propagarse por el aire presente en el medio antes de poder ser detectada por el sensor.
Clasificación de los Robots según su Generación
Primera Generación: Manipuladores

Esta primera etapa se puede considerar desde los años 50s ,en donde las maquinas diseñadas cuentan con un sistema de control relativamente sencillo de lazo abierto, esto significa que no existe retroalimentación alguna por parte de algún sensor y realizan tareas previamente programadas que se ejecutan secuencialmente.
Resumido: Los robots no se percatan de su entorno, adquieren información muy limitada de su entorno o nula y en consecuencia a esta actúan.
2G
Segunda Generación: Robots de Aprendizaje

La segunda etapa se desarrolla hasta los años 80s, este tipo de robots son un poco mas conscientes de su entorno que su previa generación, disponiendo de sistemas de control de lazo cerrado en donde por mediode sensores adquieren información de su entorno y obtienen la capacidad de actuar o adaptarse según los datos analizados.
También pueden aprender y memorizar la secuencia de movimientos deseados mediante el seguimiento de los movimientos de un operador humano.
Resumido: Los robots ahora cuentan con un sistema de retroalimentación que les permite obtener mas datos de su entorno y guardarlos en algún medio de almacenamiento junto con las instrucciones.
3G
Tercera Generación: Robots con Control Sensorizado

Durante esta etapa, que tiene lugar durante los años 80s y 90s, los robots ahora cuentan con controladores(computadoras) que usando los datos o la información obtenida de sensores, obtienen la habilidad de ejecutar las ordenes de un programa escrito en alguno de los lenguajes de programación que surgen a raíz de la necesidad de introducir las instrucciones deseadas en dichas maquinas.
Los robots usan control del tipo lazo cerrado, lo cual significa que ahora son bastante conscientes de su entorno y pueden adaptarse al mismo.
Resumido: Los robots se vuelven reprogramables, usan controladores o computadoras para analizar la información captada de su entorno mediante sensores(cabe mencionar que se desarrolla la visión artificial) y aparecen los lenguajes de programación.
4G
Cuarta Generación: Robots Inteligentes

Esta generación se caracteriza por tener sensores mucho mas sofisticados que mandan información al controlador y la analizan mediante estrategias complejas de control. Debido a la nueva tecnología y estrategias utilizadas estos robots califican como "inteligentes", se adaptan y aprenden de su entorno utilizando "conocimiento difuso" , "redes neuronales", y otros métodos de análisis y obtención de datos para así mejorar el desempeño general del sistema en tiempo real, donde ahora el robot puede basar susacciones en información mas solida y confiable, y no solo esto sino que también se pueden dar la tarea de supervisar el ambiente que les rodea, mediante la incorporación de conceptos "modélicos" que les permite actuar a situaciones determinadas.
Resumido: Mejores sistemas sensoriales, mejores estrategias de control y análisis de información,capaces de comprender su entorno y actuar ante el mediante conceptos "modélicos" en tiempo real.
5G
Quinta Generación y más allá

La siguiente generación sera una nueva tecnología que incorporara 100% inteligencia artificial y utilizara metodos como modelos de conducta y una nueva arquitectura de subsumción, además de otras tecnologías actualmente en desarrollo como la nanotecnología.
Esta etapa depende totalmente de la nueva generación de jóvenes interesados en robótica, una nueva era de robots nos espera.
Clasificación de los Robots según su Nivel de Inteligencia
Los Japoneses (JIRA) tienen su propia forma de clasificar a los robots dentro de seis clases basada en el Nivel de Inteligencia del Robot:
1) Dispositivos de manejo manual, controlados por una persona.
2) Robots de secuencia arreglada.
3) Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente.
4) Robots regeneradores, donde el operador humano conduce el robot a través de la tarea.
5) Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea.
6) Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
Clasificación de los Robots según el Nivel de Control Ejecutan
1) Nivel de inteligencia artificial, donde el programa aceptará un comando como "levantar el producto" y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas.
2) Nivel de modo de control, donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados.
3) Niveles de servo-sistemas, donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementadas en este nivel.
Clasificación de los Robots según el Nivel del Lenguaje de Programación
1) Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados.
2) Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.
3) Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus accionessobre los objetos que el robot manipula.
Clasificación de los Robots según su Aplicación
1) Robots Médicos, fundamentalmente , prótesis para disminuirdos fisicos que se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precisión los movimientos y funciones de los organos o extremidades que suplen.
2) Exoesqueletos Robóticos (Dirígete al articulo)
3) Robots Industriales
Clasificación de los Robots según su Arquitectura
La arquitectura, definida por el tipo de configuración general del robot, se clasifica en lo siguiente:
1) Poli-articulados, Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios -aunque excepcional-mente pueden ser guiados para efectuar desplazamientos limitados- y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajorelativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deducir el espacio ocupado en el suelo.
2) Móviles, Son robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por tele-mando o guiándose por la información recibida de su entorno a través de sus sensores. Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoelectricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
3) Androides, Son robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
Uno de los aspectos más complejos de estos robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simu ltáneamente el equilibrio del robot .
4) Zoomorficos, Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los robots zoomórficos no caminadores está muy poco evolu cionado.En cambio, los robots zoomórficos caminadores multípedos son muy numeroso y están siendo experimentados en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos robots serán interesante en el campo de la exploración espacial y en el estudio de los volcanes.
5) Híbridos, Estos robots corresponden a aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, e s al mismo tiempo uno de los atributos de los robots móviles y de los robots zoomórficos. De igual forma pueden considerarse híbridos algunos robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los r obots industriales. En parecida situación se encuentran algunos robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los robots personales.
Clasificación de los Robots según su Arquitectura
La arquitectura, definida por el tipo de configuración general del robot, se clasifica en lo siguiente:
1) Poli-articulados, Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios -aunque excepcional-mente pueden ser guiados para efectuar desplazamientos limitados- y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajorelativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deducir el espacio ocupado en el suelo.
2) Móviles, Son robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por tele-mando o guiándose por la información recibida de su entorno a través de sus sensores. Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoelectricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
3) Androides, Son robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
Uno de los aspectos más complejos de estos robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simu ltáneamente el equilibrio del robot .
4) Zoomorficos, Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los robots zoomórficos no caminadores está muy poco evolu cionado.En cambio, los robots zoomórficos caminadores multípedos son muy numeroso y están siendo experimentados en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos robots serán interesante en el campo de la exploración espacial y en el estudio de los volcanes.
5) Híbridos, Estos robots corresponden a aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, e s al mismo tiempo uno de los atributos de los robots móviles y de los robots zoomórficos. De igual forma pueden considerarse híbridos algunos robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los r obots industriales. En parecida situación se encuentran algunos robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los robots personales.
{kind=link}